|
Vibration Monitoring |
|
The majority of condition monitoring problems ultilise vibration analysis techniques in one form or another. The following section details the vibration analysis techniques and instrumentation used to solve these problems. |
|
À |
Acceleration covers frequencies 0 - 20 KHz and beyond |
|
|
|
À |
Velocity covers frequencies typically 2 - 2 KHz |
|
|
|
À |
Displacement, a measure of absolute position covers frequencies 0.001 up to 200 Hz. |
|
Sensor Interfaces |
|
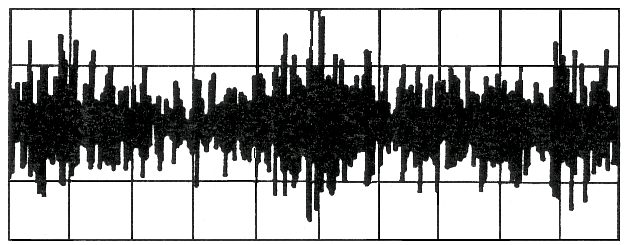
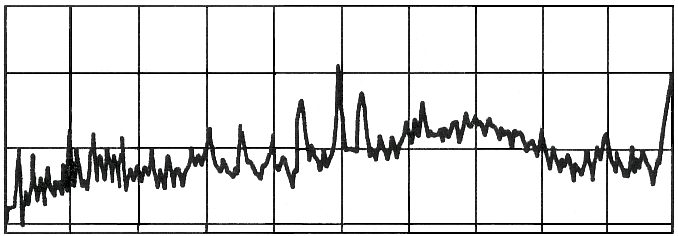
The NetPod 4000 instrument can be configured to accept sensor inputs from most types of vibration detectors. The most common sensor used for this type of analysis being the ICP accelerometer which requires constant current drive. It offers good noise immunity and is simple to install and operate. Figures 3 and 4 below show a time history trace and corresponding spectral analysis from this sensor. |
|
Time (s) |
|
Frequency (Hz) |
|
0 |
|
50 |
|
20 |
|
30 |
|
40 |
|
0 |
|
8 |
|
-62 |
|
-2 |
|
Fig 3 |
|
Fig 4 |
|
Vibration sensors are supplied in different sizes and shapes and supply an output signal that can be in the form of a variable voltage or current. No matter what type of output is generated the 4000 system interfaces can read these signals and convert them into suitable engineering units: |
|
NPAI16-V178K 78 KHz 16 bit interface |
|
Which vibration readings to take |
|
À |
Bearing failures |
|
À |
Misalignment |
|
À |
Worn couplings |
|
À |
Loose mountings |
|
À |
Cavitation |
|
À |
Rotor imbalance |
|
|
|
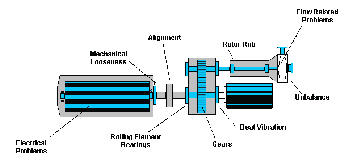
Fig 5 |
|
Fig 8 shows the typical typical rotating machine components and the problems that vibration analysis techniques can detect. |
|
7 |